Generalized correlation coefficient (GCC) based algorithms are popular for computations of direction of arrivals (DOA) from uniform linear arrays (ULA) due to their simplicity and ease of implementation on real time operating systems. These algorithms are however sensitive to the direction of the impinging signals arising from timing errors in the pairwise delay estimates.
Consider a  microphone ULA as shown in Figure 1:
microphone ULA as shown in Figure 1:
![]()
![]()
Figure 1: N microphone ULA
For each pair of unique sensors, the time delay estimate will obey
\frac{d}{c} \sin{\theta},~ j > i ~\forall \{i,j\}")
where  is the time delay between microphones
is the time delay between microphones  and
and  ,
,  is the delay between two consecutive microphones and
is the delay between two consecutive microphones and  is the sound velocity. The so called pairwise microphone noise robustness factor,
is the sound velocity. The so called pairwise microphone noise robustness factor,  which is defined as
which is defined as  = \left |\frac{\partial \theta}{\partial \Delta_{i,j}} \right |") can be used to find the least squares estimate using
can be used to find the least squares estimate using
 = \frac{c}{d N^2 - d N} \sum\limits_{i=1}^{N-1} \sum\limits_{j=i+1}^N \frac{1}{\left| (j-i) \cos{\theta} \right|}")
To illustrate, consider a distance of  , then Figure 2 below shows the NRF for different number of microphones. Thus depending on the application, a broadside solution for the desired DOA may be preferable to an endfire solution. It should also be noted that in RTOs, the signals are sampled and the pairwise delays may also suffer from inter sample delays.
, then Figure 2 below shows the NRF for different number of microphones. Thus depending on the application, a broadside solution for the desired DOA may be preferable to an endfire solution. It should also be noted that in RTOs, the signals are sampled and the pairwise delays may also suffer from inter sample delays.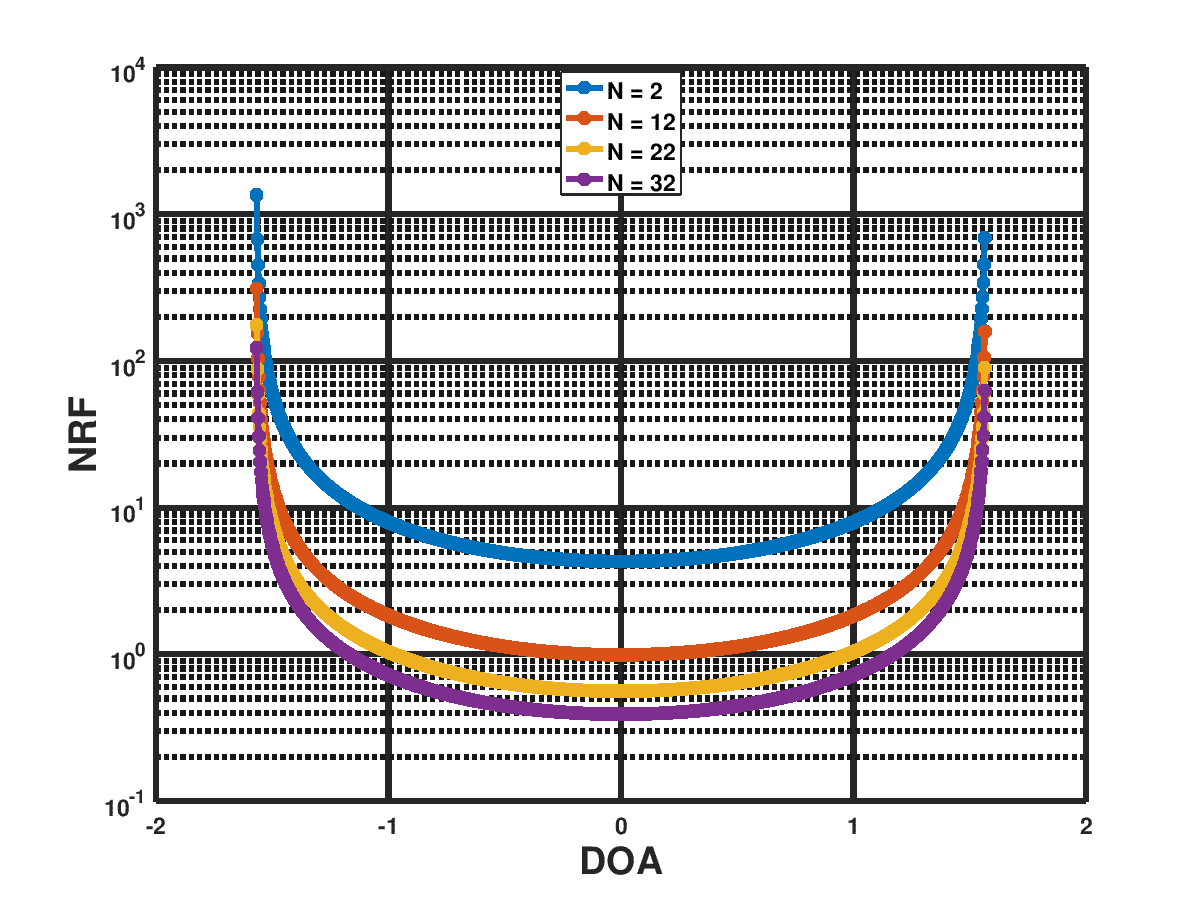
Figure 2: NRF for different number of microphones in the ULA
VOCAL Technologies offers custom designed solutions for beamforming with a robust voice activity detector, acoustic echo cancellation and noise suppression. Our custom implementations of such systems are meant to deliver optimum performance for your specific beamforming task. Contact us today to discuss your solution!