Distributed transmit beamforming is a communication scheme where a number of untethered transmitter nodes organize themselves into a virtual antenna array to form a directional beam at a receiver node. Distributed beamforming algorithm implementations are increasingly being deployed in sensor networks for their scalability and energy efficiency. A sensor network of N sensors will result in an N 2 -fold increase in power at the receiver end with a corresponding 1 power reduction at each transmit sensor to achieve similar received signal strength at the receiver compared to a single transmit node. Figure 1 illustrates a typical distributed transmit beamforming setup.
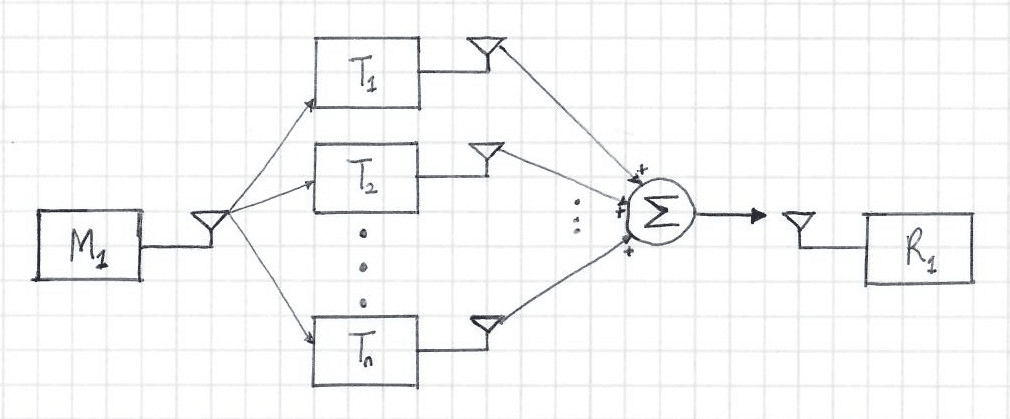
Figure 1: Distributed transmit beamforming by transmitters T1, , Tn at receiver R1 using a master node M1 for frequency locking of transmitters.
There are two subproblems that are being tackled to achieve maximum beam at the receiver. The first is frequency locking of transmit nodes and the second is phase alignment of the transmitted signals due to different channels between each transmitter and the receiver coupled with the unique delays corresponding to each transmitter’s signal. M1 sends an unmodulated tone to all transmitter nodes who use the signal as a reference for frequency offset compensation. The second problem is the actual beamforming. Here, the transmitters each apply random perturbations independently to the phase of the transmitted signals. R1 then sends a feedback signal on whether the received signal strength (RSS) of the current epoch increased or decreased. If there was a decrease in RSS, the previous perturbations to the phases are discarded, a new perturbation is applied. If there was an increase in RSS, the previous phase perturbation is kept, a new perturbation is applied. The implementation at the individual transmit node is illustrated in Figure 2.
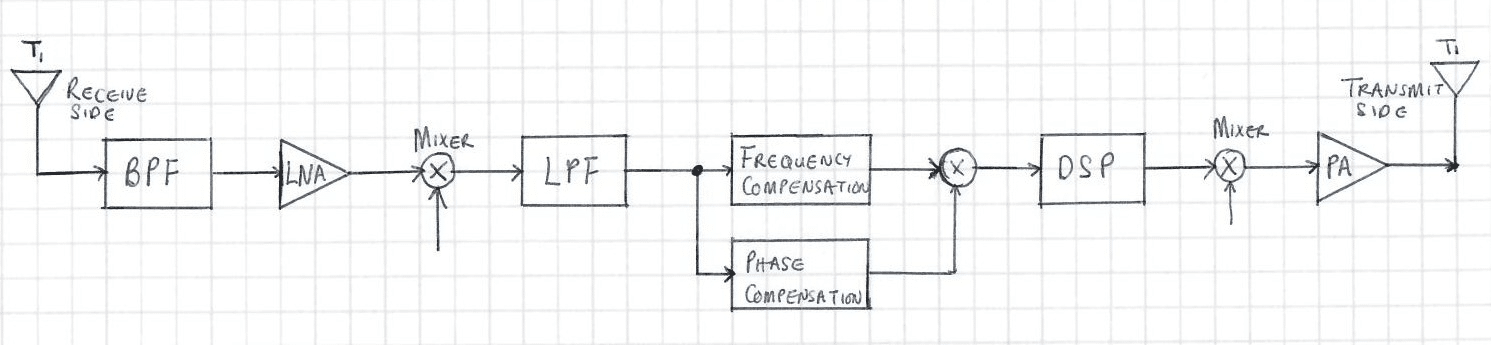
Figure 2: Signal processing blocks at a single beamforming transmitter node T1.
This algorithm leads to almost sure transmitter coherence with the added advantage of robustness to noise, estimation errors, dropped feedback signal samples and non-stationary phases or channel.