Root-MUSIC based sub-band angle of arrival estimation for broadband acoustic signals. Angle of arrival estimation based of generalized correlation coefficients are generally limited in accuracy by the maximum allowable delay samples based on sensor arrangement topology and sampling frequency. MUSIC based approaches are also limiting in their computational requirement due to their exhaustive search over the angle of arrival parameter, making them impracticable in online systems. A compromise is the use of root-MUSIC algorithm which eliminates the need for the search over the possible angles of arrival. The case for the two sensors case is even more compelling since exact close forms can be extracted.
Consider a far field acoustic signal impinging  microphones with separation distance
microphones with separation distance  at an angle of
at an angle of  . The signal at microphone
. The signal at microphone  ,
,  , can be denoted as
, can be denoted as
 = s(t - \tau_i) + \nu_i(t), i \in \{1, 2\}")
where  is the delay of the desired signal at microphone ,
is the delay of the desired signal at microphone , ") is the source signal,
is the source signal, ") is noise and
is noise and  is the speed of acoustic signals. Both and
is the speed of acoustic signals. Both and ") are zero mean ergodic processes. We will like to estimate the angle of arrival and beamform . The setup is as shown in Figure 1.
are zero mean ergodic processes. We will like to estimate the angle of arrival and beamform . The setup is as shown in Figure 1.
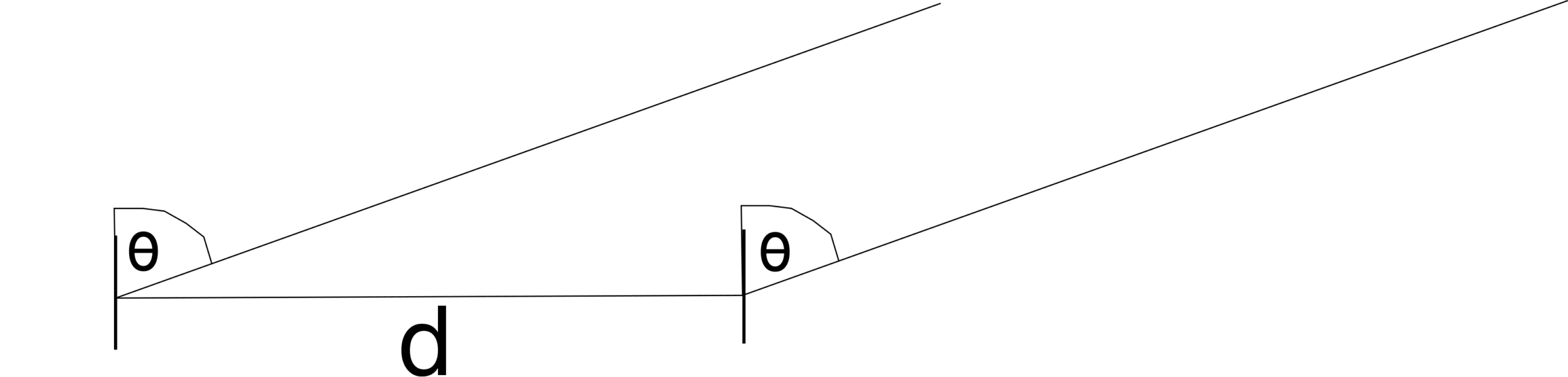
Two microphones with pairwise distance of
The sample covariance matrix for the two signals is given as:
} = \begin{bmatrix}|X_1(\omega)|^2 & X_1(\omega) X_2^*(\omega) \\ X_2(\omega) X_1^*(\omega) & |X_2(\omega)|^2 \end{bmatrix}")
Eigen decomposition of the sample co-variance matrix will delineate the signal and noise subspace. The noise subspace is a  subspace, denoted
subspace, denoted  = \begin{bmatrix} \mathcal{E}_1(\omega) \\ \mathcal{E}_2(\omega) \end{bmatrix}")
The steering vector can simply be denoted as
= \begin{bmatrix}1 \\ z^{-1} \end{bmatrix}")
The root music manifold is then defined as:
 = z^{-1}\left(\mathcal{E}_1(\omega) \mathcal{E}_2^*(\omega) +(\mathcal{E}_1(\omega) \mathcal{E}_1^*(\omega)+\mathcal{E}_2(\omega) \mathcal{E}_2^*(\omega) )z+\mathcal{E}_2(\omega) \mathcal{E}_1^*(\omega) z^2\right)")
The solution of the equation above is a one of the roots of a second order polynomial. The root close to the unit circle is the desired solution and the angle can be evaluated straight away using  .
.
VOCAL Technologies offers custom designed direction of arrival estimation solutions for beamforming with a robust voice activity detector, acoustic echo cancellation and noise suppression. Our custom implementations of such systems are meant to deliver optimum performance for your specific beamforming task. Contact us today to discuss your solution!